Студентам > Курсовые > Разработка микропроцессорного устройства цифрового фильтра
Разработка микропроцессорного устройства цифрового фильтраСтраница: 1/6
СОДЕРЖАНИЕ
Реферат…………………………………………………….…………....4
Введение………………………………………………………………...5
1. Обзор аналогичных устройств………………….……...……………7
2. Выбранный вариант
технического решения…….………………...11
3. Синтез
проектируемого устройства………………………………..19
4.
Разработка алгоритма программы проектируемого устройства…20
5.
Программа на языке ассемблер…………...………………….…….25
6. Разработка и
описание принципиальной схемы…………………..30
Вывод……....…………………………………………………….……..33
Список литературы……………………………………………….……34
Приложение А………………………………………………………….35
Приложение Б………………………………………………………….36
Р Е Ф Е Р А Т
Пояснительная записка: 34 с., 12
рис.
Цель
работы – построение цифрового фильтра с применением современных
микропроцессорных систем, освоение методов автоматического проектирования и
совершенствование навыков программирования на языке Ассемблер.
В работе использован микропроцессор фирмы MICROCHIP серии PIC16C711, имеющей возможности аналоговой обработки
сигналов. ЦАП не входит в состав микроконтроллера и вынесен отдельно, его входы
подключены к порту B.
В ходе проектирования были использованы не все ресурсы
микропроцессорной системы, поэтому имеется возможность совершенствования
устройства. К примеру, можно построить алгоритм цифровой обработки нескольких
аналоговых сигналов, используя для каждого сигнала свой канал и программу
вычислений.
Программа, написанная на языке Ассемблер,
является универсальной для всех микроконтроллеров фирмы MICROCHIP, имеющих возможность аналоговой обработки сигналов. Необходимо лишь
сконфигурировать порты и учесть спецификацию РОН и специальных регистров в
соответствии с документацией на требуемую модель.
Благодаря современным технологиям
разработчик устройств цифровой обработки сигналов может в кратчайшие сроки
составлять высокопроизводительные системы с дальнейшим доведением их до
производства.
Наличие большого выбора недорогих
высокопроизводительных микропроцессорных устройств зарубежного производства на
рынке Украины позволяет студенту, радиолюбителю реализовывать свои схемы и
алгоритмы в виде технически готового устройства.
ВВЕДЕНИЕ
Цифровая
обработка сигнала – это арифметическая обработка в реальном масштабе времени
последовательности значений амплитуды сигнала, определяемых через равные
временные промежутки. Примерами цифровой обработки являются:
· фильтрация сигнала;
· свертка двух сигналов;
· вычисление значений корреляционной функции двух
сигналов;
· усиление, ограничение или трансформация сигнала;
· прямое/обратное преобразование Фурье.
Аналоговая
обработка сигнала, традиционно используемая во всех радиотехнических
устройствах, является во многих случаях более дешевым способом достижения
требуемого результата. Однако тогда, когда требуется высокая точность
обработки, миниатюрность устройства, стабильность его характеристик в различных
температурных условиях функционирования, цифровая обработка оказывается
единственным приемлемым решением.
R2
  x(t)
x(t) C
y(t) x(t)
x(t) C
y(t)
 R1 R1
 y(t)
y(t)
t t
входной
сигнал
выходной сигнал
Рисунок 1.1 - Аналоговая фильтрация сигнала
Пример
аналоговой фильтрации приведен на рисунке 1. Используемый в фильтре операционный
усилитель позволяет расширить динамический диапазон обрабатываемых сигналов.
Форма амплитудно-частотной характеристики фильтра определяется величинами R2, C. Для аналогового фильтра сложно
обеспечить высокое значение добротности, характеристики фильтра сильно зависят
от температурного режима. Компоненты фильтра вносят дополнительный шум в
результирующий сигнал. Аналоговые фильтры трудно перестраивать в широком
диапазоне частот.
Важнейшая
особенность цифрового фильтра заключается в том, что подбором определенных
значений коэффициентов разностного уравнения, описывающего выходной сигнал,
можно выполнить преобразование входного сигнала, которое будет нереализуемо при
использовании аналогового фильтра. Само устройство, реализующее цифровую
фильтрацию, будет иметь компактные размеры и не будет требовать особой
технической настройки.
1. ОБЗОР АНАЛОГИЧНЫХ УСТРОЙСТВ
Фильтры – это частотно-избирательные устройства,
которые пропускают или задерживают сигналы, лежащие в определенных полосах
частот. До 60-х годов для реализации фильтров применялись, в основном,
пассивные элементы, т. е. индуктивности, конденсаторы и резисторы. Основной
проблемой при реализации таких фильтров оказывается размер катушек
индуктивности (на низких частотах они становятся слишком громоздкими). С
разработкой в 60-х годах интегральных ОУ появилось новое направление
проектирования активных фильтров на базе ОУ. В активных фильтрах применяются
резисторы, конденсаторы и усилители (активные компоненты), но в них нет катушек
индуктивности. В дальнейшем активные фильтры почти полностью заменили
пассивные. Сейчас пассивные фильтры применяются только на высоких частотах
(выше 1МГц), за пределами частотного диапазона большинства ОУ широкого
применения.
Сейчас во многих случаях аналоговые фильтры
заменяются цифровыми. Работа цифровых фильтров обеспечивается, в основном
программными средствами, поэтому они оказываются значительно более гибкими в
применении по сравнению с аналоговыми. С помощью цифровых фильтров можно реализовать
такие передаточные функции, которые очень трудно получить обычными методами.
Тем не менее, цифровые фильтры пока не могут заменить аналоговые во всех
ситуациях, поэтому сохраняется потребность в наиболее популярных аналоговых
фильтрах – активных RC –фильтрах.
Фильтры
можно классифицировать по их частотным характеристикам. На рисунке 1.2
изображены характеристики фильтра нижних частот (а), фильтра верхних частот
(б), полосового фильтра (в). Основная функция любого фильтра заключается в том,
чтобы ослабить сигналы, лежащие в определенных полосах частот, внести в них
различные фазовые сдвиги или ввести временную задержку между входным и выходным
сигналами.
С
помощью активных RC – фильтров нельзя получить идеальные формы частотных
характеристик в виде прямоугольников со строго постоянным коэффициентом
передачи в полосе пропускания, бесконечным ослаблением в полосе подавления и
бесконечной крутизной спада при переходе от полосы пропускания к полосе
подавления. Проектирование активного фильтра всегда представляет собой поиск
компромисса между идеальной формой характеристики и сложностью её реализации.
Это называется «проблемой аппроксимации». Во многих случаях требования к
качеству фильтрации позволяют обойтись простейшими фильтрами первого или
второго порядка. Набор таких схем приведен ниже. Проектирование фильтра в этом
случаи сводится к выбору схемы с наиболее подходящей конфигурацией и
последующему расчету значений номиналов элементов для конкретных частот.
 Рисунок 1.2 – Типовые
характеристики фильтров. Рисунок 1.2 – Типовые
характеристики фильтров.
Однако
бывают ситуации, когда требование к фильтрации сигнала могут оказаться гораздо
более жесткими, и могут потребоваться схемы фильтра с характеристиками более
высоких порядков, чем первых или второй. Проектирование фильтра высоких
порядков является более сложной задачей.
Анализ состояния и тенденций развития
теории и практики цифровой фильтрации показывает, что основными используемыми
методами являются частотная селекция сигналов и оптимальная (адаптивная)
фильтрация.
Классификация цифровых фильтров (ЦФ) была предложена в докладе Д.А.
Губанова и В.Б. Сташенко В ее основу положен функциональный признак (т. е.
используемые алгоритмы цифровой фильтрации, а не схемотехнические решения),
согласно которому ЦФ подразделяются на 4 группы: фильтры частотной селекции,
оптимальные (квазиоптимальные), адаптивные и эвристические.
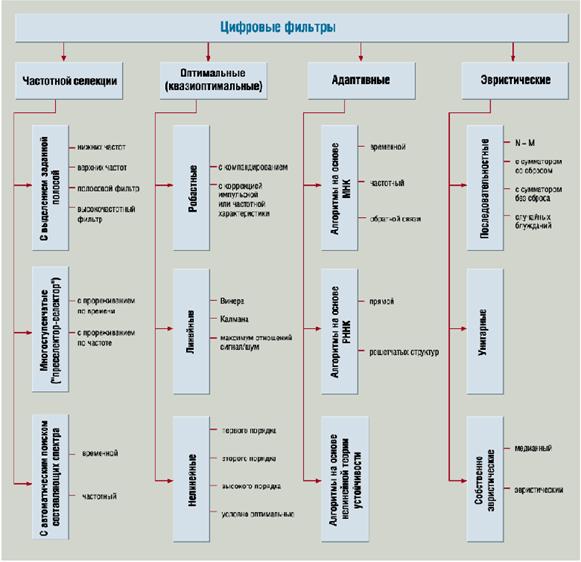
Рисунок 1.3 – Классификация цифровых фильтров
Наиболее изученными и опробованными на практике являются ЦФ
частотной селекции. Они почти всегда представляют собой реализованные на новой
элементной базе традиционные аналоговые фильтры частотной селекции. Выступления
участников конференции показали, что развитие цифровых средств частотной
селекции происходит в следующих направлениях:
-
создание пакетов прикладных программ для
структурного синтеза, анализа качества фильтрации, обеспечения
схемотехнической реализации и тестирования устройств;
-
совершенствование существующих методов
оптимального проектирования многоступенчатых структур с целью их полной
формализации и включения в состав ПО;
-
разработка новых подходов к проектированию ЦФ
частотной селекции с улучшенными качественными показателями.
Новейшие технические реализации как традиционных, так и
нетрадиционных задач цифровой обработки сигналов чаще всего используют разные
схемотехнические решения. Наибольшее внимание участников секции цифровой
фильтрации привлекли алгоритмы многоскоростной обработки сложных сигналов,
которые содержат как быстро, так и медленно меняющиеся составляющие. Такой
алгоритм должен предусматривать предварительное разделение «быстрых» и
«медленных» компонентов с понижением частоты дискретизации «медленных»
составляющих и последующей их обработкой. Современные вычислительные средства
позволяют решать в режиме реального времени и задачи многомерной фильтрации,
существенно более сложные, чем цифровая фильтрация одномерных сигналов,
выполняемая с помощью сигнальных процессоров или многопроцессорных систем.
2. ВЫБОР ВАРИАНТА ТЕХНИЧЕСКОГО РЕШЕНИЯ
Мир
современных технологий наполнен разнообразием микропроцессорных устройств.
Десятки крупнейших фирм производителей конкурируют между собой, предлагая
каждый день новую более совершенную продукцию. В курсовом проекте используется
цифровая обработка сигналов. Для цифровой обработки сигналов используются так
называемые сигнальные микропроцессоры. Рассмотрим некоторые микроконтроллеры,
выпускаемые современной промышленностью, наиболее подходящие для реализации
курсовой работы.
2.1 МИКРОПРОЦЕССОРЫ КОМПАНИИ ANLOG DEVICES.
Микропроцессоры
компании Analog Devices образуют два семейства: ADSP21xx и ADSP210xx.
Семейство ADSP21xx – набор
однокристальных 16-разрядных микропроцессоров с общей базовой архитектурой,
оптимизированной для выполнения алгоритмов цифровой обработки сигналов и других
приложений, требующих высокоскоростных вычислений с фиксированной точкой.
Второе
семейство микропроцессоров ADSP210xx объединяет 32-х разрядные микропроцессоры, ориентированные
на сигнальные алгоритмы, требующие вычислений с плавающей точкой.
В рамках каждого
семейства микропроцессоров обеспечивается совместимость снизу вверх по системе
команд. Старшие представители семейства обладают большими функциональными
возможностями и содержат на кристалле дополнительные функциональные блоки.
Рассмотрим подробнее
микропроцессоры первого семейства, так как их возможности наиболее подходят для
реализации проекта.
Микропроцессоры
семейства ADSP21xx успешно конкурируют с аналогичной продукцией
других компаний производителей сигнальных процессоров благодаря сравнимой
производительности при более низкой цене, а также развитой системе технических
и программных средств разработки прикладных систем. Основными конкурентами
данного семейства являются микропроцессоры DSP56xxx (Motorola) и TMS320C1x, TMS320C2xx, TMS320C5x (Texas Instruments).
Высокая
производительность процессоров на сигнальных алгоритмах достигается благодаря
многофункциональной и гибкой системе команд, аппаратной реализации большинства
типичных для данных приложений операций, высокой степени параллелизма процессов
в микропроцессоре, сокращения командного такта. Микропроцессоры ADSP21xx имеют модифицированную
Гарвардскую архитектуру, в рамках которой предусматривается возможность доступа
в память команд, при ее физическом разделении с памятью данных.
Каждый
микропроцессор семейства содержит три независимых полнофункциональных
устройства: АЛУ, МАС – умножитель с накоплением, устройство барабанного сдвига.
Каждое устройство непосредственно оперирует с 16-ти разрядными данными и
обеспечивает аппаратную поддержку вычислений с различной точностью.
Микропроцессор
содержит генератор адресов команд и два генератора адресов данных,
обеспечивающие адресацию к данным и командам, расположенным как во внутренней,
так и во внешней памяти. Параллельное функционирование генераторов сокращает
длительность выполнения команды, позволяя за один такт выбирать из памяти
команду и два операнда.
Таймер/счетчик
микропроцессора обеспечивает периодическую генерацию прерываний.
Последовательные
порты (SPORTs) обеспечивают последовательный интерфейс
с большинством стандартных последовательных устройств, а также с аппаратными
средствами сжатия-восстановления данных, использующими A-
и m- законы компандирования.
Порт интерфейса с
хост-процессором позволяет без дополнительных интерфейсных схем взаимодействовать
с главным микропроцессором системы, в качестве которого может использоваться
как процессор данного семейства, так и другой микропроцессор, например Motorola 68000 или Intel 8051.
Микропроцессор ADSP – 21msp5x
отличается наличием аналогового интерфейса, позволяющего совмещать аналоговую и
цифровую обработку. В состав интерфейсных средств входят АЦП, ЦАП, цифровой и
аналоговый фильтры, параллельный интерфейс к процессорному ядру.
Система команд
микропроцессоров семейства оптимизирована для алгоритмов цифровой обработки
сигналов. По системе команд все микропроцессоры совместимы снизу вверх.
Совершенствование данного семейства идет в направлении повышения тактовой
частоты, снижения энергопотребления и расширения коммуникационных возможностей
процессора.
| 

