Студентам > Рефераты > Тахогенераторы постоянного тока
Тахогенераторы постоянного токаСтраница: 2/3
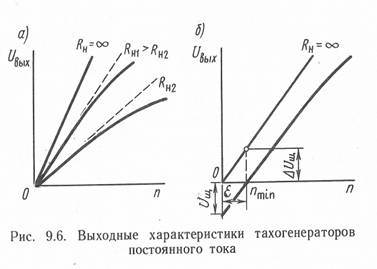
В тахогенераторах постоянного тока технологическая неточность установки щеток на геометрической нейтрали вызывает еще один вид погрешности-ассимметрию выходного напряжения, Она заключается в том, что величина выходного напряжения различна при вращении якоря с одинаковой частотой, но в противоположных направлениях. При сдвиге щеток с геометрической нейтрали возникает продольная составляющая потока якоря, которая при одном направлении вращения совпадает с потоком возбуждения, а при другом-противоположна ему. Следовательно, результирующий поток машины при обоих направлениях вращения будет различным, при этом различными будут э. д. с., индуктируемые в якоре.
Асимметрию выходного напряжения вычисляют как отношение разности выходных напряжений при вращении якоря с номинальной частотой в обоих направлениях к полусумме этих напряжений. В зависимости от класса точности тахогенератора скоростная амплитудная погрешность при номинальной частоте вращения составляет ±(0,05-3) %, а ошибка асимметрии равна ±(1-3)%.
Источником погрешности является также непостоянство магнитного потока обмотки возбуждения Фв. При электромагнитном возбуждении тахогенератора причиной
этого может быть колебание напряжения UВ, подводимого к обмотке возбуждения, нагрев этой обмотки.
В обоих случаях изменяется ток возбуждения IB что ведет к изменению потока Фв. Для уменьшения возможных колебаний потока Ф. магнитную систему тaxoгeнepaтора выполняют с сильным магнитным насыщением, т.е рабочую точку 1 на кривой намагничивания принимают за «коленом» насыщения магнитной системы. Из построений рис. 9.7, а видно, что изменение тока возбуждения Iв на ∆Iв1 в зоне точки 1 вызывает изменение потока возбуждения на ∆Фв1, значение изменений здесь намного меньше, чем в зоне точки 2, лежащей на прямолинейном участке кривой намагничивания, расположенном до «колена» насыщения (∆Фв1 <<∆Фв2).
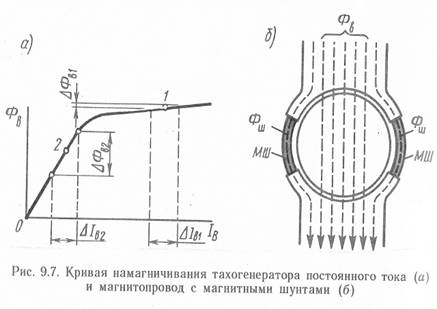
Сильное магнитное насыщение магнитной цепи тахогенератора не всегда целесообразно, потому что увеличивается объем обмотки возбуждения, а следовательно, габаритные размеры тахогенератора. В тахогенераторах с ненасыщенной магнитной системой для ограничения колебаний потока возбуждения Ф. последовательно в цепь обмотки возбуждения включают терморезистор, компенсирующий изменение сопротивления обмотки при колебаниях температуры, или применяют магнитные шунты МШ (рис. 9.7,б),
изготовленные из сплава, изменяющего свое магнитное сопротивление при изменении температуры нагрева. Например, при нагреве обмотки возбуждения ее сопротивление увеличивается, ток Iв и поток Фв уменьшаются. Но при этом магнитное сопротивление шунтов увеличивается, что уменьшает поток Фш через шунты и увеличивает поток Фв. через полюс и якорь на величину, компенсирующую его уменьшение от изменения тока возбуждения. При снижении температуры процессы идут в обратном направлении. В итоге происходят лишь незначительные колебания потока возбуждения.
Все причины, вызывающие отклонение выходной характеристики тахогенератора от прямолинейной, ведут к амплитудной погрешности. Тахогенераторы постоянного
тока имеют амплитудную погрешность от 0,5 до 3%.
В тахогенераторах постоянного тока возможна пульсация выходного напряжения, обусловленная рядом причин: зубчатой поверхностью сердечника якоря;
неравномерностью воздушного зазора или неодинаковой магнитной проводимостью сердечника якоря по разным радиальным направлениям; вибрацией щеток и замыканием
секций обмотки якоря в процессе коммутации; небольшим количеством секций в обмотке якоря из-за малых габаритных размеров машины Пульсации напряжения могут вносить помехи в работу автоматических устройств, элементом которых являются тахогенераторы. Пульсации напряжения можно ослабить за счет более качественной технологии изготовления тахогенеpaтopa с применением веерной сборки листов сердечника якоря (листы укладывают в пакет со сдвигом на однозубцовое деление), а также подключением сглаживающего фильтра на выход тахогенератора. Однако полностью избавиться от пульсаций не удается. Амплитуды пульсации выходного напряжения тахогенераторов постоянного тока составляют 0.1-3 % от среднего значения выходного напряжения.
На работу тахогенератора оказывают влияние также пульсации выходного напряжения, обусловленные: 1) зубчатым строением якоря (зубцовые пульсации); 2) изменением магнитного потока за время одного оборота вследствие эллиптичности, эксцентриситета якоря или магнитной анизотропии его материала (якорные пульсации); 3) периодическим изменением числа секций в параллельных ветвях якоря; особенно при малом числе коллекторных пластин; 4) вибрацией щеток и замыканием накоротко части секций
ТАХОГЕНЕРАТОРЫ постоянного тока В СХЕМАХ АВТОМАТИКИ
Применение тахогенераторов постоянного тока в различных системах управления объясняется тем, что входным сигналом для большинства регуляторов в схемах автоматики является напряжение постоянного тока; тахометры с равномерными шкалами являются вольтметрами магнитоэлектрической системы и по существу измеряют напряжение постоянного тока, пропорциональное частоте вращения.
В замкнутой системе регулирования тахогенераторы являются основным звеном контура обратной связи по частоте вращения. Часто считают, что тахогенератор — это безынерционное звено или (при наличии RС-фильтра для сглаживания пульсаций повышенной частоты) инерционное звено первого порядка с небольшой постоянной времени, определяемой RС-цепочкой фильтра.
Более глубокие исследования, однако, показывают, что с учетом ∆UЩ и люфтов в подвижной передаче (муфты, зубчатые пары) узел тахогенератора становится нелинейным звеном, вызывающим автоколебания системы управления. При этом наиболее вредные низкочастотные пульсации напряжения на выходе узла тахогенератора в большей степени зависят от органических недостатков применяемых передач, чем от собственно тахогенератора как электрической машины.
В системе автоматического управления под тахогенератором (ТГ) принято понимать комплекс устройств или узел между валом двигателя и входом усилителя. В приводах с тахогенераторами этот узел включает в себя устройство сочленения (муфту, зубчатую передачу), собственно тахогенератор, проводку до панели управления, а иногда также выходной трансформатор, фильтр и потенциометр.
На рис.9.8 в качестве примера приведена простейшая структурная схема управляемого электропривода с обратной связью по частоте вращения. Схема управления предназначена для того, чтобы обеспечить частоту вращения механизма М пропорциональной неизменному эталонному напряжению или изменять ее пропорционально напряжению программного устройства ПУ. Для этого напряжение ТГ в устройстве сравнения УС сопоставляется с напряжением источника эталонного напряжения или программного устройства и их разность подается на усилитель, где она усиливается, как правило, двумя последовательными каскадами — предварительным усилителем У и усилителем мощности УМ, к которому подключен двигатель Д. Нетрудно заметить, что чем выше коэффициент усиления по напряжению и по мощности усилителей, тем меньшими должны быть разность напряжений и мощность, отдаваемая ТГ, которые необходимо подавать на вход У, чтобы обеспечить заданную частоту вращения, и тем точнее будет выдерживаться пропорциональностью между частотой вращения и напряжением ПУ.
|