Студентам > Курсовые > Радиолокационная Головка Самонаведения
Радиолокационная Головка СамонаведенияСтраница: 1/6
2. ОБЩИЕ СВЕДЕНИЯ О РЛГС.
2.1 Назначение
Радиолокационная головка самонаведения устанавливается на ракете класса "земля-воздух" для обеспечения на конечном этапе полета ракеты автоматического захвата цели, ее автосопровождения и выдачи сигналов управления на автопилот (АП) и радиовзрыватель (РБ).
2.2 Технические характеристики
РЛГС характеризуется следующими основными тактико-техническими данными:
1. зона поиска по направлению:
- по азимуту ± 10°
- по углу места ± 9°
2. время обзора зоны поиска 1,8 - 2,0 сек.
3. время захвата цели по углу 1,5 сек (не более)
4. маμмальные углы отклонения зоны поиска:
- по азимуту ± 50° (не менее)
- по углу места ± 25° (не менее)
5. маμмальные углы отклонения равносигнальной зоны:
- по азимуту ± 60° (не менее)
- по углу места ± 35° (не менее)
6. дальность захвата цели типа самолета ИЛ-28 с выдачей сигналов управления на (АП) при вероятности не ниже 0,5 -19 км, а при вероятности не ниже 0,95 -16 км.
7 зона поиска по дальности 10 - 25 км
8. рабочий диапазон частот f ± 2,5%
9. средняя мощность передатчика 68 Вт
10. длительность ВЧ-импульса 0,9 ± 0,1 мксек
11. период следования ВЧ-импульсов Т ± 5%
12. чувствительность приемных каналов - 98дб (не менее)
13.потребдяема мощность от источников питания:
- от сети 115 в 400 Гц 3200 Вт
- от сети 36 в 400 Гц 500 Вт
- от сети 27 600 Вт
14.вес станции – 245 кг.
3. ПРИНЦИПЫ ДЕЙСТВИЯ И ПОСТРОЕНИЯ РЛГС
3.1 Принцип действия РЛГС
РЛГС представляет собой радиолокационную станцию 3-х сантиметрового диапазона, работающую в режиме импульсного излучения. При самом общем рассмотрении РЛГС может быть разбита на две части: - собственно радиолокационную часть и автоматическую часть, обеспечивающую захват цели, ее автоматическое сопровождение по углу и дальности и выдачу сигналов управления на автопилот и радиовзрыватель.
Радиолокационная часть станции работает обычным образом. Высокочастотные электромагнитные колебания, генерируемые магнетроном в виде очень коротких импульсов, излучаются с помощью остронаправленной антенны, принимаются той же антенной, преобразуются и усиливаются в приемном устройстве, проходят далее в автоматическую часть станции - систему углового сопровождения цели и дальномерное устройство.
Автоматическая часть станции состоит из трех следующих функциональных систем:
1. системы управления антенной, обеспечивающей управление антенной во всех режимах работы РЛГС (в режиме "наведение', в режиме "поиск" и в режиме "самонаведение", который в свою очередь, подразделяется на режимы "захват" и "автосопровождение")
2. дальномерного устройства
3. вычислителя сигналов управления, подаваемых на автопилот и радиовзрыватель ракеты.
Система управления антенной в режиме "автосопровождение" работает по так называемому дифференциальному методу, в связи с чем в станции применена специальная антенна, состоящая из сфероидального зеркала и 4-х излучателей, вынесенных на некоторое расстояние перед зеркалом.
При работе РЛГС на излучение формируется одно-лепестковая диаграмма направленности с маμмумом совпадающим с осью антенной системы. Это достигается за счет разной длины волноводов излучателей - имеется жесткий сдвиг по фазе между колебаниями разных излучателей.
При работе на прием диаграммы направленности излучателей сдвинуты относительно оптической оси зеркала и пересекаются на уровне 0,4.
Связь излучателей с приемопередающим устройством осуществляется через волноводный тракт, в котором имеются два последовательно включенных ферритовых коммутатора:
· коммутатор осей (ФКО), работающий с частотой 125 Гц.
· коммутатор приемников (ФКП), работающий с частотой 62,5 Гц.
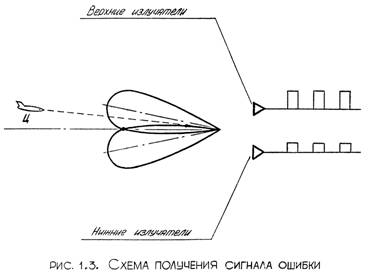
Ферритовые коммутаторы осей переключают волноводный тракт таким образом, что сначала подключают к передатчику все 4 излучателя, формируя одно-лепестковую диаграмму направленности, а затем к двухканальному приемнику, то излучатели, создающие две диаграммы направленности, расположенные в вертикальной плоскости, то излучатели, создающие две диаграммы направленности в горизонтальной плоскости. С выходов приемников сигналы попадают на схему вычитания, где в зависимости от положения цели относительно равносигнального направления, образованного пересечением диаграмм направленности данной пары излучателей, вырабатывается разностный сигнал, амплитуда и полярность которого определяется положением цели в пространстве (рис. 1.3).
Синхронно с ферритовым коммутатором осей в РЛГС работает схема выделения сигналов управления антенной, с помощью которой вырабатывается сигнал управления антенной по азимуту и по углу места.
Коммутатор приемников переключает входы приемных каналов с частотой 62,5Гц. Коммутация приемных каналов связана с необходимостью усреднения их характеристик, так как дифференциальный метод пеленгации цели требует полной идентичности параметров обоих приемных каналов. Дальномерное устройство РЛГС представляет собой систему с двумя электронными интеграторами. С выхода первого интегратора снимается напряжение, пропорциональное скорости сближения с целью, с выхода второго интегратора - напряжение, пропорциональное дальности до цели. Дальномер осуществляет захват ближайшей цели в диапазоне 10-25км с последующим ее автосопровождением до дальности 300 метров. На дальности 500 метров с дальномера выдается сигнал, служащий для взвода радио-взрывателя (РВ).
Вычислитель РЛГС является счетно-решающим устройством и служит для Формирования сигналов управления, выдаваемых РЛГС на автопилот (АП) и РВ. На АП подаётся сигнал, представляющий проекции вектора абсолютной угловой скорости луча визирования цели на поперечные оси ракеты. Эти сигналы используются для управления ракетой по курсу и тангажу. На РВ с вычислителя поступает сигнал, представляющий проекцию вектора скорости сближения цели с ракетой на полярное направление луча визирования цели.
Отличительными особенностями РЛГС по сравнению с другими аналогичными ей по своим тактико-техническим данным станциями являются:
1. применение в РЛГС длиннофокусной антенны, характеризующейся тем, что Формирование и отклонение луча осуществляется в ней с помощью отклонения одного довольно легкого зеркала, угол отклонения которого вдвое меньше угла отклонения луча. Кроме того, в такой антенне отсутствуют вращающиеся высокочастотные переходы, что упрощает ее конструкцию.
2. использование приемника с линейно-логарифмической амплитудной характеристикой, что обеспечивает расширение динамического диапазона канала до 80 дб и, тем самым, делает возможным пеленгацию источника активной помехи.
3. построение системы углового сопровождения по дифференциальному методу, обеспечивающему высокую помехозащищенность.
4. применение в станции оригинальной двухконтурной замкнутой схемы компенсации рыскания, обеспечивающей высокую степень компенсации колебаний ракеты относительно луча антенны.
| 

