Студентам > Курсовые > Автоматизированный электропривод
Автоматизированный электроприводСтраница: 2/4
Погрешность выходного напряжения 0.05%
Температурный коэффициент нестабильности 3*10-6/оС
Минимальное входное напряжение 5 В
Потребляемый ток 1 мА
Максимальный выходной ток 30-50 мА
Изменение выходного напряжения (при Iвых=30 50 мА) 0.05%
По такой же схеме организован прием и формирование логических сигналов UA на микропроцессор.
3. Блок гальванической развязки входных сигналов и сигналов, поступающих на микропроцессор.
Входные величины поступают из внешней (для контроллера) среды, что говорит о возможном наличии помех различных типов. Так же необходимо предусмотреть возможность неправильной полярности подключения датчиков. Поэтому возникла необходимость в гальванической развязке сигналов.
Для того, чтобы развязать входные уровни микропроцессора и входных сигналов от датчиков применены три оптопары К249КН4П. Характеристики, по которым они были выбраны:
Uмахком=60 В;
Iвхmin=10 мА;
Iвхmax=25 мА;
Iком=8 мА. Резисторы R1 и R2 рассчитываются из условий максимального входного и коммутируемого токов. Диод обеспечивает защиту от неправильной полярности включения.
Резисторы:
R1 C2 – 23 0.25Вт 1600 Ом±0.25%
R2 C2 – 23 0.125Вт 270 Ком±0.1%
Диод КД521А(Д220А):
Uпр=1В, Uобр=75В, Iпр.ср=50мА, Iобр=1мкА. Обработка выходных величин: Электромагнит.
В данной работе автомат генерирует выходной сигнал управления электромагнитом (=24В, 10Вт). Данная мощность явно не позволяет подключать электромагнит непосредственно к выходу микропроцессора, поэтому здесь целесообразно применить мощные твердотельные оптоэлектронные реле. Мощность на выходе которых может достигать достаточно больших значений. В оптопаре одновременно реализуется гальваническая развязка силовой и управляющей цепей, а также усиление по мощности сигнала. Схема подключений оптоэлектронного реле:
Твердотельное реле для цепей постоянного тока 5П19А1:
Напряжение коммутации -60 +60В
Ток коммутации . -3 3А
Входной ток . 10 – 25мА
Входное напряжение в выключенном состоянии -3.5 0.8 В
Рассеиваемая мощность . 1000мВт
Температура окр. среды -45 +85
Корпус SIP12
Резистор:
R C2 – 23 0.125Вт 360 Ом±0.1%
Транзисторный модуль
Транзисторный модуль М2ТКИ-50-12 управляется специализированным драйвером - драйвер транзисторных модулей такого типа - IR2112 фирмы InternationalRectifier. Драйвер способен выдерживать напряжения до 600 вольт. Схема включения приведена ниже:
 Symbol Description Symbol Description
VDD Logic supply
HIN Logic input for high side gate driver output (HO), in phase
SD Logic input for shutdown
LIN Logic input for low side gate driver output (LO), in phase
V SS Logic ground
VB High side floating supply
HO High side gate drive output
V S High side floating supply return
VCC Low side supply
LO Low side gate drive output
COM Low side return
Диод VD должен выдержать обратное напряжение 600В.
Диод КД105Г(КД209В):
Uпр=1В
Iср.пр=300мА
Iср.обр=0.1мА
Uобр=800В
Драйвер IR2112:
Параметры драйвера:
VOFFSET 600V max.
IO+/- 200 mA / 420 mA
VOUT 10 - 20V
ton/off (typ.) 125 & 105 ns
Delay Matching 30 ns
Корпус DIP14.
Резисторы:
R C2 – 29 0.5 10 Ом±0.25%
Конденсатор:
C К73 – 17 630В 0.1мкФ±10%
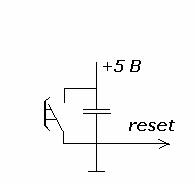
Начальный сброс микропроцессора
Для системы, построенной на базе микропроцессора необходима схема начального сброса и система предохранения от зависания. Так как из-за сильной электромагнитной помехи может исказиться часть информации, обрабатываемой микропроцессором в данный момент, что чревато сбоем в алгоритме управляющей программы, а так же зацикливанием работы процессора или его «зависанием». Все это приводит к отказу в работе контроллера.
Как правило, такие сильные и фатальные помехи случаются очень редко, но если контроллер выполняет часть операций в отлаженном техническом процессе, то такой его отказ приводит к возникновению незапланированного простоя в работе и большими экономическими убытками.
Работоспособность контроллера можно восстановить, подав на процессор команду сброса (reset). Такие функции выполняет WatchDog Taimer. В данной работе эта система не реализована. Сброс микроконтроллера можно будет произвести кратковременным сбросом питающего напряжения или кнопкой Reset, расположенной на передней панели.
Конденсатор:
C К50-16-50В-1 мкФ
Индикация
Возможны несколько способов реализации индикации:
- на светодиодах,
- на ЖК элементах,
- на цифровых или символьных индикаторах и др.
Для обеспечения визуального наблюдения за функционированием контроллера введен блок индикации сигналов. Его реализация является программной.
Подпрограмма опрашивает состояния входов и выходов и выводит эти значения в порт P0 микропроцессора МК51.
Непосредственно на эти выходы подключены светодиоды, которые визуально отображают состояние входов и выходов.
Для того, чтобы светодиоды можно было подключить напрямую к порту, они должны потреблять как можно меньше тока, но при этом обеспечивать достаточную яркость свечения.
Этим запросам полностью удовлетворяют выбранные светодиоды КИПД02Б-1К. Ниже в таблице приведены их основные параметры.
| Тип прибора | Цвет свечения | Значения параметров при Т=25°С | Iпр.мах. mA | Uобр (Uобр.и) B | | Iv. мккд (L, кд/м2) | Uпр. B | Iпр.ном. mA | мах. mkM | |
КИПД02Б-1К |
Красный |
900 |
1,8 |
5 |
0,7 |
20 |
3.0 |
|