Студентам > Рефераты > Применение лазеров в связи и локации
Применение лазеров в связи и локацииСтраница: 8/8
Предложена усовершенствованная радиолокационная система. Она позволяет обнаруживать подвижные объекты, точно измерять расстояние до них, угловые координаты и скорость их движения.
Оптический локатор (рисунок 2.2, а) состоит из передающей части, в которую входит лазер 1 и система отклонения 2, которая производит механическую или электрическую прерывистую развертку луча лазера. 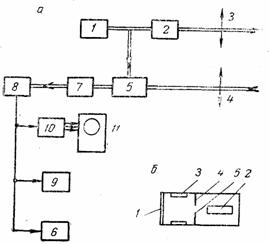
Рисунок 2.2 – Усовершенствованная радиолокационная система оптического диапазона
Отклоненный луч проходит через оптическую систему 5 и осуществляет обзор пространства по азимуту и углу места. Передача светового сигнала не является непрерывной, и начало излучения каждого импульса происходит в строго определенный момент времени. С этой целью при передаче модулятор прерывает свет на время, которое необходимо отклоняющему устройству для изменения положения луча в пространстве. Это позволяет точно измерить момент возврата отраженного луча и, следовательно, расстояние до цели. Электронное отклонение луча можно осуществить, например, с помощью ультразвуковой ячейки или другим способом. Обратный луч, отраженный различными точками зоны обзора, принимается оптической системой 4 и затем смешивается в микшере 5 с оптическим излучением лазера 6. Микшер создает световой луч, центральная частота которого равна частоте передачи и частота огибающей равна разности переданной и принятой приемником частот. Сигнал биений появляется только в том случае, если луч поступает от цели, имеющей определенную радиальную скорость по отношению к локатору. Частота этого сигнала пропорциональна доплеровской частоте объекта и, следовательно, радиальной скорости. Устройство 7 отклоняет луч с выхода микшера одновременно с разверткой так, что приемное устройство принимает только один луч, отраженный от цели. Такое устройство устраняет помехи, создаваемые солнцем, при освещении зоны обзора. Устройство 7, обеспечивающее при приеме выбор полезных сигналов, несущих информацию, стоит на входе фотоумножителя. Система подавления помех (рисунок 2.2, б) состоит из фотокатода 1 и фотоумножителя 2, усиливающего электронный пучок и создающего на выходе сигнал. Амплитуда сигнала пропорциональна энергии принятого светового луча. Система содержит также устройство 3, вызывающее отклонение электронного пучка, и экран 4, непроницаемый для электронов с отверстием 5. Отклонение электронного пучка регулируется одновременно с разверткой, осуществляемой при приеме так, чтобы в момент, соответствующий строго определенному направлению, визирования, только часть электронного пучка, получаемая из отраженных сигналов, была отклонена к отверстию и передана фотоумножителю. Устройство, вызывающее отклонение, управляется электрическим путем, например изменением напряжения на электродах отклоняющей системы. Фотоумножитель 8 (рисунок 2.2, а) на выходе создает электрический сигнал, частота которого равна частоте биений на выходе микшера 5 (рисунок 2.2, б) и, следовательно, пропорциональна скорости цели. Этот сигнал направляется затем к трем специальным устройствам системы 6, 9, 10. Устройство 10, осуществляющее грубую фильтрацию частоты сигнала, передает его на осциллограф 1 по различным выходным каналам, в соответствии с диапазоном частот в котором он находится. Устройство 10 состоит из трех фильтров, полосы пропускания которых смежны и перекрывают общий диапазон частот, возникающих в соответствии с диапазоном скоростей цели. Сигнал, поступающий от цели, скорость которой выходит за пределы этого диапазона, практически подавляется системой фильтров. Выходы трех фильтров подключаются ко входам, соответствующим разным цветам луча многоцветного осциллографа 11, например трехцветного. На осциллографе получают изображение наблюдаемой зоны, при этом развертка экрана осуществляется таким образом, что точки, изображающие наблюдаемые цели, дают относительные угловые координаты этих целей. Точки различных цветов соответствуют различным скоростям целей. Цели со слишком малыми или слишком большими скоростями не появляются на экране осциллографа.
Одновременно электрический сигнал с фотоумножителя подводится к системам 6 и 9, измеряющим дальность и угловые координаты цели, запеленгованной на экране осциллографа, а также скорость.
Измерение дальности производится способом, описанным выше. Скорость измеряется устройством, которое состоит из фильтров, на общий вход которых подводится электрический сигнал от фотоумножителя. Фильтры имеют очень узкие полосы пропускания и смежные границы, при этом совокупность полос пропускания перекрывает тот же диапазон частот, что и совокупность трех фильтров. Эти фильтры разделяют входной сигнал, в соответствии с его частотой, что позволяет определить скорость цели. Точность, полученная при таком измерении скорости, определяется шириной полосы пропускания каждого фильтра. Доплеровские частоты, полученные при использовании рассматриваемого оптического локатора, достаточно высоки даже при относительно низких скоростях цели. Например, при длине волны в 1 мк доплеровские частоты цели, радиальная скорость которой расположена в пределах 3,5— 110 км/час, колеблются от 2 до 60 Мгц. В радиолокаторе, работающем на длине волны в 0,1 м, доплеровские частоты, полученные при таких же скоростях цели, колеблются в пределах 20— 600 гц. Увеличение доплеровских частот цели улучшает рабочие характеристики локатора. Это одно из основных преимуществ такого оптического локатора по сравнению с обычными радиолокаторами.
Список использованных источников
1. Мазуров М. Е., Обухов В. А. Лазеры в технике связи. – М.: Труды ИНИИПИ, 1969. – 48 с.
2. Под ред. В. П. Тычинского. Применение лазеров. – М.:«Мир», 1974.
3. И. Н. Матвеев. Лазерная локация. – М.: Машиностроение, 1984
4. Отв. ред. Н. Г. Басов. Лазеры и их применение. – М.: «Наука», 1974. - 231 с.
5. Тарасов Л. В. – Лазеры и их применение: Учебное пособие для студентов ПТУ. – М.: Радио и связь, 1983. – 152 с.
6. Петровский В. И., Пожидаев О. А. Локаторы на лазерах. М.: Воениздат, 1969.
7. Фёдоров Б.Ф. Лазеры и их применение. М.: ДОСААФ, 1973.
8. Чернышёв В. Н. Лазеры в системах связи. М.: Связь, 1966.
Copyright © Radioland. Все права защищены.
Дата публикации: 2008-04-09 (0 Прочтено) |


