Студентам > Дипломные работы > Компьютерная Томография
Компьютерная ТомографияСтраница: 1/10
Содержание.
Введение
1.
Обоснование разработки
2. Анализ технического задания и
разработка структурной схемы
3.
Выбор способа ввода цифрового сигнала в компьютер
3.1 Особенности параллельного порта
3.2 Программирование порта
4.
Разработка принципиальной схемы устройства
4.1. Выбор аналого-цифрового преобразователя
4.2 Ограничение уровня входного аналогового сигнала
4.3 Преобразование аналогового сигнала
4.4 Защита АЦП
4.5 Обеспечение источника питания и устройства индикации
5.
Разработка программного обеспечения
5.1 Обмен данными с АЦП
5.2 Преобразование полученных данных
5.3 Запуск и остановка управляемой программы
5.5 Настройка программы
5.6 Использование программы
6.
Конструкторский раздел
6.1. Расчет надежности
6.2. Разработка конструкции
7.
Рекомендации по организации рабочего места врача топометриста.
8.
Экономика.
Заключение.
Приложения.
Литература.
Введение
В настоящее время в
медицинских исследованиях широко используются компьютерные томографы. С их
помощью можно получить поперечное компьютерно-томографическое изображение. Это
изображение имеет целый ряд преимуществ, включая возможность его реконструкции
в нужной проекции, а также высокую способность к передаче низкоконтрастных
объектов, которая у компьютерных томографов значительно выше , чем у других
методов построения рентгеновского изображения. Недостатком компьютерных
томографов является их дороговизна. Однако, существует возможность получения
реконструируемого изображения аналогичного компьютерно-томографическому с
помощью рентгеновского симулятора для планирования лучевой терапии, который
имеет некоторые сходства с томографом (вращающиеся вокруг тела пациента
источник и приемник рентгеновского излучения). Рентгеновские симуляторы находят
применение в лечебных учреждениях, занимающихся лечением онкозаболеваний. Для
использования симулятора как томографа необходимо при вращении излучателя и
приемника (находящихся на противоположных сторонах гантри) вокруг объекта,
непрерывно записывать получаемое изображение память ЭВМ. Далее с ее помощью,
путем применения специальных алгоритмов можно получить изображение аналогичное
тому, которое получают с помощью компьютерных томографов. Здесь встает задача
запуска и остановки программного обеспечения, захватывающего
видеопоследовательность при достижении гантри симулятора определенных углов
поворота. Решение этой задачи и является целью данной работы.
1. Обоснование разработки
Рентгеновский симулятор
- это аппарат для определения величины и положения (ориентации и удаления от
излучателя) области облучения, а также маркирования этой области на теле
пациента при планировании лучевой терапии, проводимой далее на мощных аппаратах
с использованием радиоизотопов и ускорителей частиц. Симулятор также средство
контроля изменений очага заболевания в результате облучений. На основании
данных этого контроля врач принимает решение об изменении параметров облучения
при дальнейшем лечении.
Важность создания и
применения симуляторов обусловлена большой мощностью излучения при лучевой
терапии и необходимостью весьма точно направлять его поток на очаг заболевания
для достижения максимального лечебного эффекта при минимальном воздействии на
здоровые ткани и органы.
Симулятор по своим
электрическим и радиационным параметрам аналогичен диагностическим аппаратам.
Однако по конструкции и параметрам своих штативных устройств он в соответствии
с назначением имеет большое сходство с установками для лучевой терапии.
Все симуляторы построены
по одной схеме. Мощный рентгеновский излучатель и усилитель рентгеновского
изображения закреплены на противоположных концах П-образной дуги, которая может
совершать круговое движение относительно горизонтальной оси, закрепленной в
напольной станине. [1]
Напротив штатива
излучателя и устройства регистрации изображения (УРИ) установлен стол с
плавающей декой которая располагается в промежутке между излучателем и УРИ.
Благодаря повороту дуги, поступательным движениям деки стола и поворотам
станины стола пучок излучения может быть направлен под произвольным углом в
любую точку тела пациента, лежащего на столе.
Каретки, несущие на себе
излучатель и УРИ, могут совершать независимые поступательные движения в
плоскости дуги перпендикулярно оси вращения последней. При подобном поперечном
перемещении излучателя изменяется фокусное расстояние. Это перемещение
позволяет согласовывать установки симулятора с геометрическими параметрами
различных терапевтических аппаратов. В свою очередь, перемещение УРИ приводит к
изменению формата изображения рентгеноскопии. Используя это движение УРИ при
повороте П-образного плеча, можно поддерживать одно и то же расстояние от УРИ
до стола. При совместном движении излучателя и УРИ меняется масштаб
изображения.
Излучатель снабжен
глубинной диафрагмой, маркером поля облучения и световым дальномером. В состав
маркера входят световой проектор и молибденовые нити, образующие координатную
сетку, видимую в рентгеновском излучении и проецируемую световым проектором на
тело пациента. Рентгеновское и световое изображения сетки совпадают в
пространстве. Перемещая шторки диафрагмы при помощи электродвигателей, можно
устанавливать величину поля облучения тела пациента по размерам рентгеновского
изображения очага заболевания. Угловое положение поля в зависимости от
ориентации очага задают поворотом глубинной диафрагмы и маркера относительно
центрального луча.
Прямые и обратные
повороты несущей дуги и глубинной диафрагмы с маркером, прямые и обратные перемещения
излучателя, УРИ и шторок глубинной диафрагмы задаются нажатием соответствующих
клавиш на пульте управления. Выбранное движение прекращается при освобождении
нажатой клавиши. После прекращения движения на шкалах, расположенных на пульте
управления, а также на П-образном плече, корпусе диафрагмы и опоре стола можно
прочитать числовые значения угловых и линейных координат, определяющих
величину, положение поля облучения и ее удаленность от излучателя.
В составе симуляторов
используют мощные автономные рентгеновские питающие устройства. Выбор
оптимального положения пациента относительно излучателя, ориентации и размеров
области облучения для последующего лечения осуществляют во время рентгеноскопии
с использованием УРИ и телевизионного экрана. Соответствующее этим условиям
изображение с координатной сеткой фиксируют на крупноформатной рентгеновской
пленке, находящейся в автоматической кассете под столом пациента. После
выключения рентгеновского излучения включают световой маркер и обводят карандашом
спроецированные на тело пациента линии координатной сетки.
Полученные при помощи
симулятора числовые данные, рентгенограммы и маркировка на теле пациента служат
основой для точного планирования лучевой терапии.
Симулятор SLS
фирмы Philips позволяет точно определять место локализации опухоли
в теле пациента. Этот симулятор предназначен для проведения радиографии,
рентгеноскопии, телетерапии. Симулятор включает в себя: стол для пациента,
гантри - П-образную дугу с закрепленными на ее противоположных концах
рентгеновском излучателе и приемнике изображения, пульт управления, мониторы
для наблюдения за исследованиями. Обобщенная схема основных узлов симулятора
SLS
показана на рис 1.1. В качестве приемника рентгеновского изображения в
симуляторе используется рентгеновский электронно-оптический преобразователь
(РЭОП). Он представляет из себя электровакуумный прибор, внутри которого
входной экран преобразует рентгеновское изображение в видимое с дальнейшим
усилением его яркости электронно-оптической системой. В РЭОПе рентгеновский
экран находится в оптическом контакте с фотокатодом внутри вакуумной колбы. В
нем происходит тройное преобразование изображения:
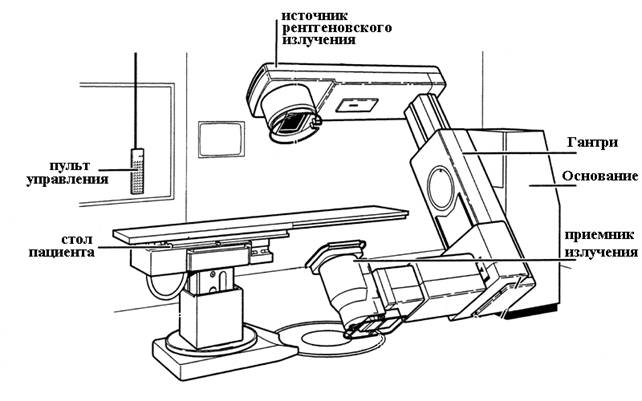
Рис. 1.1. Симулятор
SLS-9
фирмы PHILIPS Владимирского областного
онкодиспансера.
1. рентгеновское изображение
преобразуется в световое входным люминесцентным экраном, размещенным в
вакуумной колбе;
2. световое изображение через
тонкую прозрачную перегородку переносится на фотокатод, где оно преобразуется в
электронное;
3. после ускорения в
электрическом поле и электростатической фокусировки электродами 5 электроны
образуют сфокусированное уменьшенное изображение в плоскости
катодолюминесцентного экрана, где вновь возникает световое изображение. Далее
изображение фиксируется видеокамерой и выдается на монитор.
Как известно, с помощью
компьютерной томографии (КТ) можно вычленить плоское сечение тела; при этом
рентгеновское излучение проходит сквозь это сечение лишь в тех направлениях,
которые лежат внутри него и параллельны этому сечению. Никакая часть тела,
расположенная вне данного сечения, не взаимодействует с рентгеновским пучком, и
тем самым снимается проблема, характерная для обычной рентгенографии, проблема
наложения паразитных изображений от различных глубин. [2]
Рентгеновское изображение, получаемое с помощью
компьютерной томографии, представляет собой изображение некоторого среза
(толщиной обычно в несколько миллиметров).
Компьютерные
томографы создают цифровое изображение путем измерения интенсивности
рентгеновских лучей, прошедших через тело во время вращения рентгеновской
трубки вокруг пациента. Коэффициент поглощения веерного пучка рентгеновских
лучей в объекте измеряется с помощью набора из нескольких сот до нескольких
тысяч рентгеновских детекторов (обычно твердокристаллических). Детекторы
собирают информацию в каждой из проекций, которая затем оцифровывается и
анализируется компьютером. На основе полученных данных компьютер реконструирует
поперечное компьютерно-томографическое изображение. Это изображение имеет целый
ряд преимуществ, включая возможность его реконструкции в нужной проекции, а
также высокую способность к передаче низкоконтрастных объектов, которая у
компьютерных томографов значительно выше , чем у других методов построения
рентгеновского изображения.
Полученные
с помощью компьютерной томографии снимки отображают анатомическую структуру
объекта в данном сечении с пространственным разрешением около 1 мм и
разрешением по плотности лучше 1%.
Задача
отыскания распределения физической величины (например, коэффициента линейного
ослабления) g(x) была
в общем виде решена И. Радоном в 1917 г.
Рис. 1.2 К определению
смысла переменных, используемых в формулах (1.1) и (1.2). Пояснения в тексте.
Рис.
1.2 поясняет результаты инверсии Радона в двумерном случае. Пусть
L
— луч, пересекающий объект, s
— измеряемое вдоль него расстояние, О — начало
системы координат, j — угол между базисной линией ОМ, лежащей в
выбранной плоскости, и перпендикуляром, опущенным из О на L, р — кратчайшее расстояние от О до
L, n — орт, определяемый тем же углом j. В этих обозначениях можно записать
 (1.1) (1.1)
где двумерный вектор
r,
повернутый относительно ОМ на угол q,
характеризует положение на плоскости той точки, в которой отыскивается
распределение g по проекциям f(p,n). Как показано Радоном ,
 (1.2) (1.2)
В настоящее время разработано большое количество
эффективных алгоритмов, позволяющих на быстродействующих компьютерах получать
томограммы по проекциям f(p,n) и реализованных на коммерческих компьютерных
томографах.
Известны
системы томографии четырех конструктивных разновидностей, поколений. Они
отличаются друг от друга характером движения устройства «излучатель —
детекторы» при сканировании, видом пучка излучения, типом и числом детекторов.
Основная цель совершенствования сканирующих систем — уменьшение времени
исследования и увеличение информационных параметров. Принципы сканирования в
системах четырех поколений показаны на рис. 1.3.
В
системах первого поколения (рис. 1.3 а) осуществляется быстрое
поступательное движение устройства «излучатель — детекторы» относительно
объекта и затем — шаговое вращательное движение на 180° с шагом 1°. Объект
сканируется одиночным коллимированным лучом. Полный цикл сканирования двух
смежных слоев составляет 3 — 5 мин. Томографы данной разновидности в настоящее
время не выпускают.
В
системах второго поколения (рис. 1.3 б) устройство «излучатекь —
детекторы» совершает те же движения. Однако для ускорения исследования
сканирование осуществляется расходящимся пучком, состоящим в среднем из
пятнадцати коллимированных лучей. Вращательное движение осуществляется на 180°
с шагом 10—15°. Цикл сканирования составляет 20 — 40 с. На этом принципе
построено большинство нейродиагностических томографов.
Рис. 1.3.
Принципы сканирования в томографических системах четырех
поколений
Недостатки
систем первых двух поколений: 1) значительная длительность сканирования,
которая служит причиной возникновения динамических искажений при исследовании
движущихся органов тела; 2) наличие погрешностей, связанных с двумя видами
движения сканирующего устройства и возрастающих при эксплуатации аппаратуры.
В
системах третьего поколения (рис. 1.3 в) сканирование объекта осуществляется
пучком веерообразной формы, полностью перекрывающим объект, в результате
исключается поперечное поступательное движение устройства «излучатель —
детекторы», которое совершает только непрерывное вращение вокруг объекта на
180°. Излучатель работает в импульсном режиме, а излучение за объектом
измеряется большим числом (250—500) малоинерционных детекторов. Длительность
импульсов 1 — 5 мс, цикл сканирования одного слоя не превышает 5 с.
Системы четвертого поколения (рис. 1.3 г) отличаются от систем третьего
использованием еще большего числа (500—1000) неподвижных детекторов,
расставленных по окружности, и непрерывного излучения, также полностью
охватывающего объект. Длительность цикла сканирования уменьшается до 2,5 с.
В
системах первых двух поколений большое время сканирования стремятся
использовать для машинной обработки информации. С этой целью применяются методы
восстановления изображений, позволяющие начинать вычисления сразу же после
поступления массива чисел, относящихся к данному положению сканирующего
устройства.
В системах третьего и четвертого поколений,
имеющих малое время сканирования, на восстановление изображения затрачивается
дополнительное время (от нескольких секунд до 1,5— 2 мин).
К основным недостатком
компьютерных томографов можно отнести их дороговизну. Однако, существует
возможность получения реконструируемого изображения, аналогичного компьютерной
томограмме, с помощью рентгеновского симулятора SLS-9,
предназначенного для планирования лучевой терапии, который имеет некоторые сходства
с томографом (вращающиеся на общем маятнике - гантри вокруг тела пациента
источник и приемник рентгеновского излучения). Т.е. в принципе существует
возможность использовать например более дешевый и распространенный симулятор в
качестве томографа. Необходимо только запомнить ряд изображений, получаемых при
сканировании объекта вращающимися вокруг него источником и приемником
рентгеновского изображения. Такая возможность действительно существует.
Рентгеновское изображение, прошедшее через пациента, преобразуется в
видеосигнал и непрерывно отображается на мониторе. Затем с помощью
персонального компьютера и установленной на нем видео плате видеосигнал
захватывается, и с определенными параметрами (такими как частота кадров)
записывается в память.
| 

